5. Complex hierarchies
Was this helpful?


Was this helpful?
Game characters and other networked entities are often made of very deep hierarchies of nested GameObjects, needing to sync specific properties along these chains. In addition, a common use case is to parent a networked object to the tip of a chain of GameObjects.
Let's see how to handle these cases.
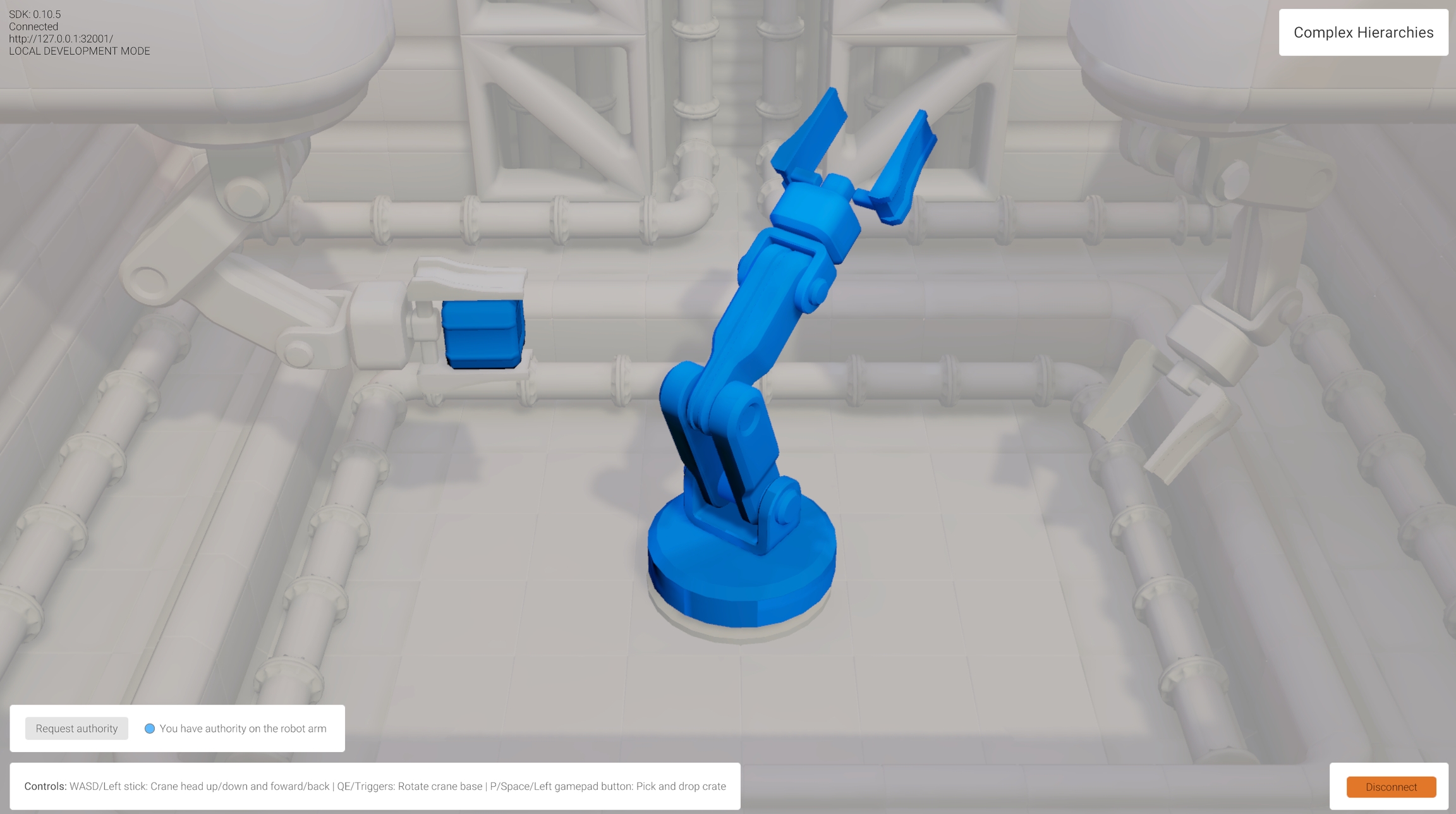
This scene features a robotic arm that can be controlled by one player at a time. In the scene, a small crate can be picked up and released.
The first player to connect takes control of the arm, and other players can request it via a UI button.
One important note: this sample describes deep parenting at runtime. For more information on edit-time deep parenting, see the page about Nesting Prefabs at Edit time.
To demonstrate complex hierarchies we choose to sync the movement of a robot arm, made of several GameObjects. In addition to syncing several positions and rotations, we also sync animation variables and other script parameters, present on child objects.
To sync the whole arm we use a coherence feature called deep bindings, that is bindings that are located not on the root object, but deeper in the transform hierarchy.
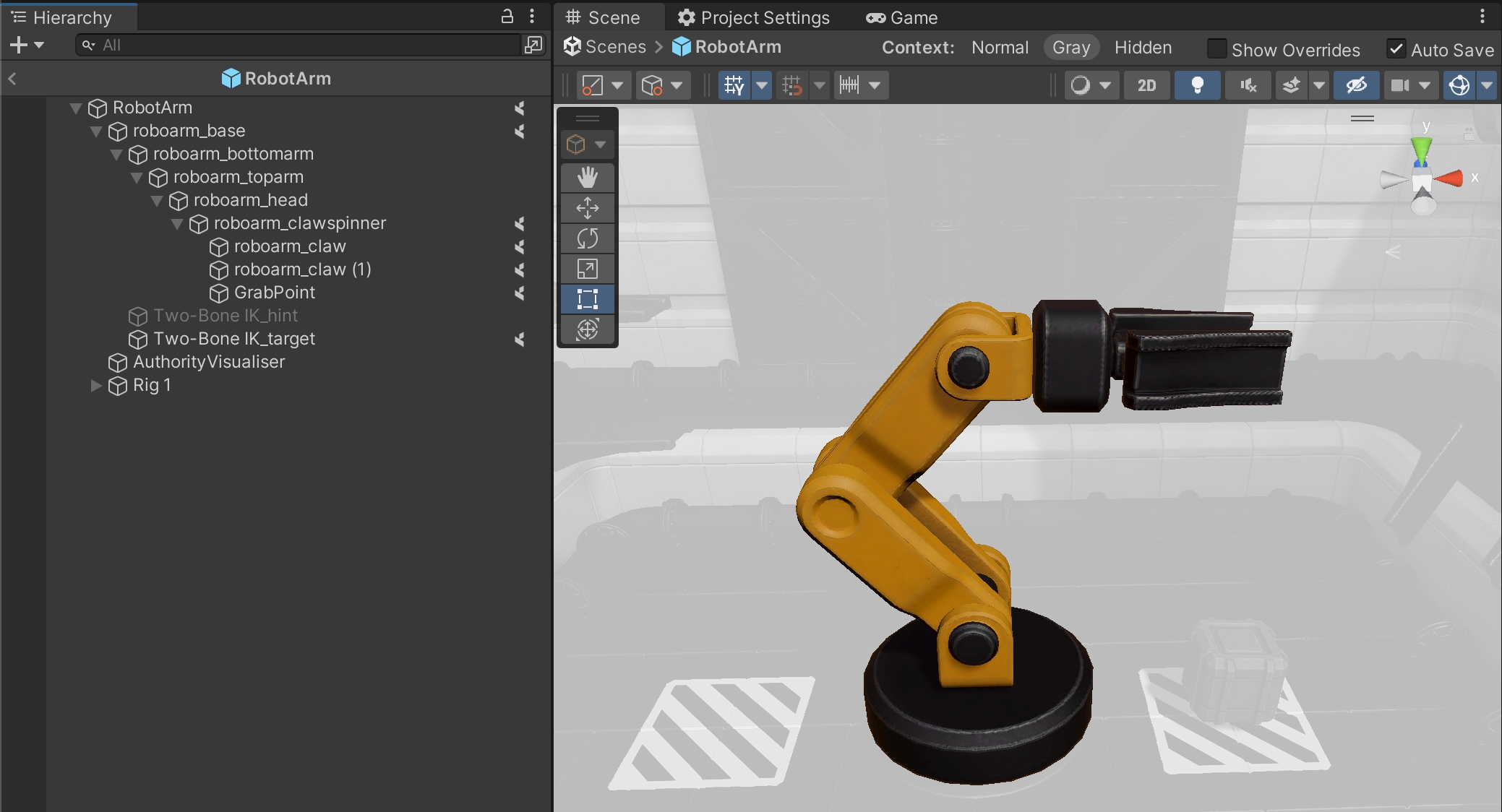
Select the RobotArm Prefab asset located in /Prefabs/Characters, and open it for editing. You will immediately notice a host of little coherence icons to the right of several GameObjects in the Hierarchy window:
These icons are telling us that these GameObjects have one or more binding currently configured (a variable, a method, or a component action).
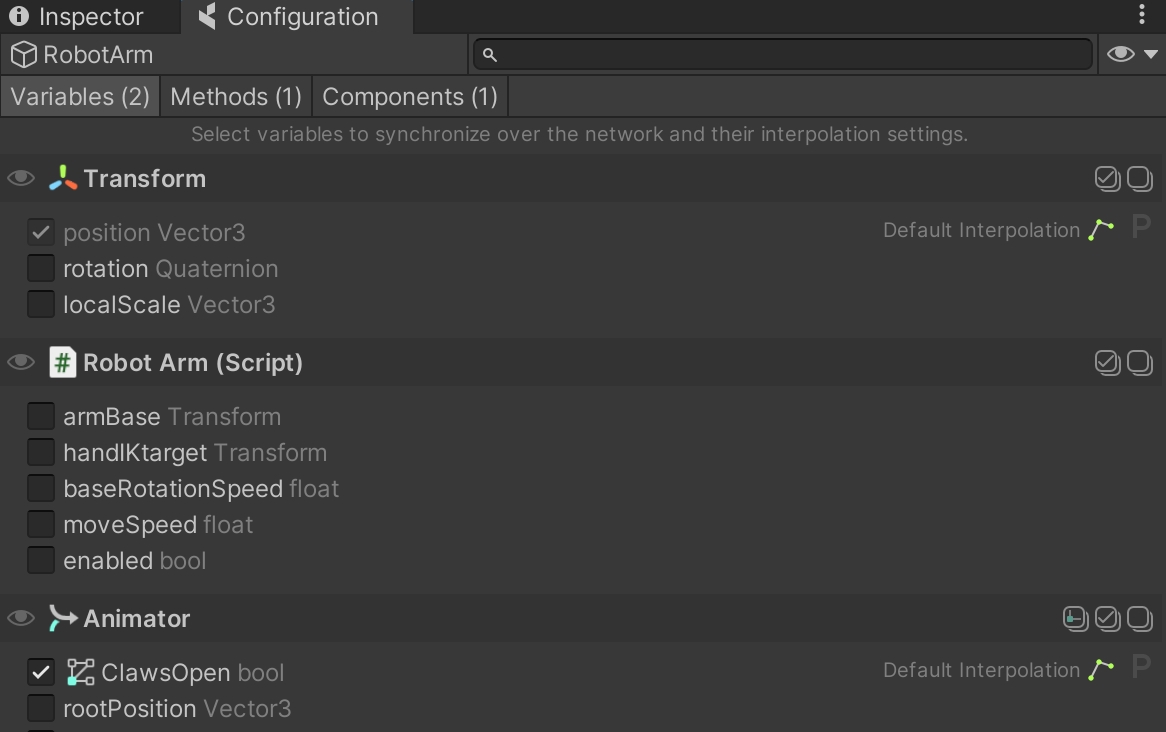
Now open the coherence Configuration window, and click through those objects to discover what's being synced:
In addition to position and rotation, we also choose to sync the animation parameter ClawsOpen, and enable Animator.SetTrigger() as a Network Command. Finally we disable the Robot Arm script when losing authority (to disallow input).
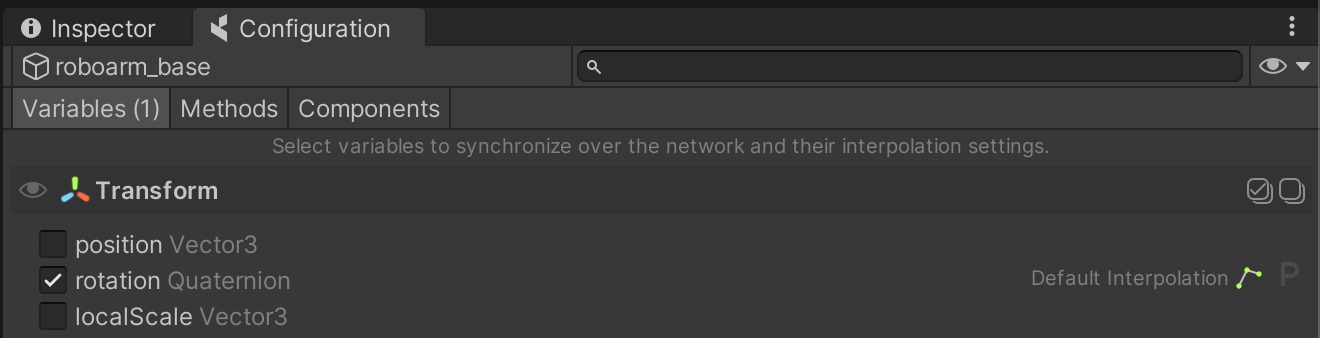
This is the base of the robot arm, for which we only sync rotation:
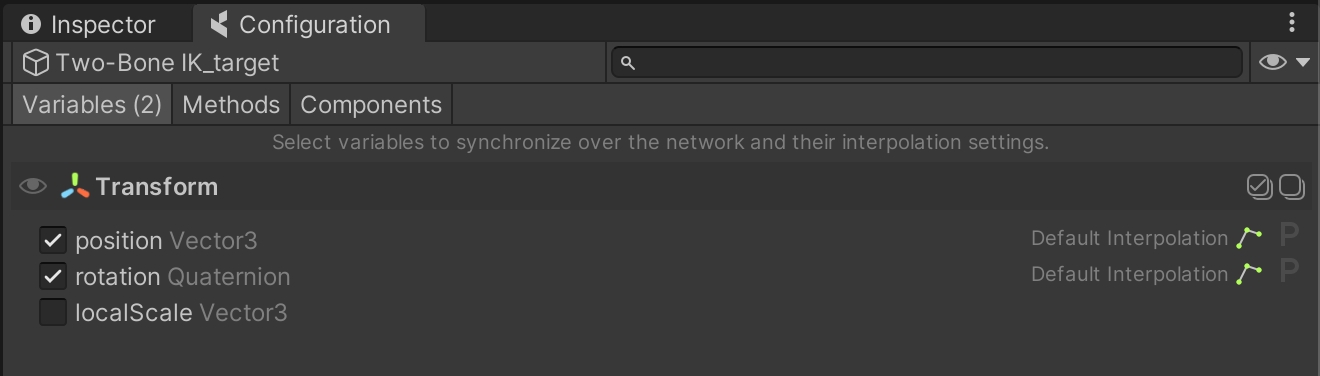
We don't sync the rotation of every object in the chain, since the arm is equipped with an IK solver, which allows us to just sync the target (Two-Bone IK_target) and work out the rotation of the limb (robotarm_bottomarm and robotarm_toparm) on each Client:
By syncing all of these properties, we can have the robotic arm move in sync on all Clients, simply by translating the tip of the IK, and rotating the base of the crane. All of the bindings in this hierarchy are synced through the Coherence Sync component present on the Prefab's root object RobotArm.
As you can see, using deep bindings doesn't require any special setup: they are enabled in exactly the same way as a binding, a Network Command, or a Component action is enabled on the root GameObject.
As mentioned in the lesson about Parenting Entities, parenting a network entity to a GameObject that belongs to a chain requires some setup. To be able to pick up the crate with the crane, we equip it with a CoherenceNode component:
The Path property displays the location in the hierarchy where this object will be inserted. It gets automatically updated by coherence every time the object is parented. Each number represents a child in the root object (and it's 0-based).
Once we have this component set up, parenting the object only requires calling Transform.SetParent() like any usual parenting operation, and setting its Rigidbody component to be kinematic.
When we do this, coherence takes care of propagating the parenting to other Clients, so that the crate becomes a child GameObject on every connected Client.
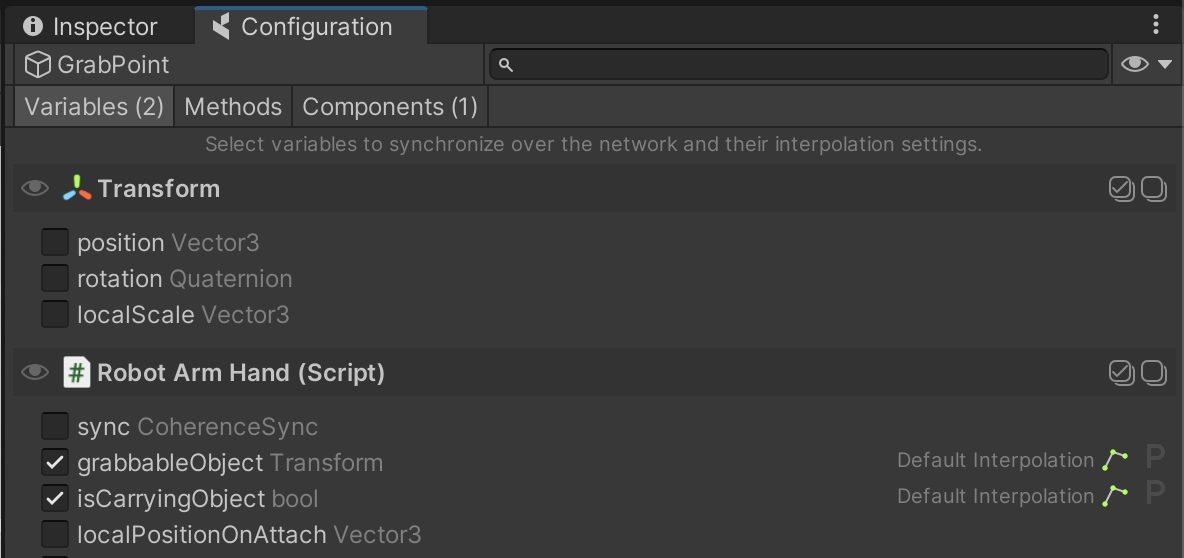
This code is in the RobotArmHand class, a component attached to the tip of our hierarchy chain: GrabPoint. In OnTriggerEnter we detect when the crate is in range, storing a reference to it in a variable of type Transform named grabbableObject.
This reference is set to sync:
When the player presses the key P (or the Left Gamepad face button), the referenced crate is parented to the GrabPoint GameObject.
Note that coherence natively supports syncing references to CoherenceSync and Transform components, and to GameObjects.
Even if the Robot Arm Hand script is disabled on non-authoritative Clients, it references the correct grabbed crate in the grabbableObject variable due to it being synced over the network. So when its authority disconnects, other Clients will already have the correct reference to the crate network entity.
This allows us to gracefully handle a case where, for instance, a Client picks up the crate and disconnects. Because both the crate and the robot arm have Auto-adopt Orphan set to "on", authority is passed onto another Client and they immediately have all the data needed to keep handling the crate.
To move authority between Clients, we can use the UI in the bottom left corner. The button is connected to the Robot Arm Authority script on the ArmAuthoritySwapper GameObject, and it transfers authority on both the robot arm and the crate. This script takes care also of what happens as a result of the transfer, including setting the crate to be kinematic or not.
Similarly to the crates in the Physics lesson, we don't just want the crate to automatically become non-kinematic when we have authority on it. We want the crate to stay kinematic when authority changes while it's being held by the arm.
Is Kinematic is set as follows:
Is being held
true
true
Has been released
false
true
The code is in the RobotArmAuthority class. To detect whether it's currently being held, it's as simple as checking whether its Transform.parent is null:
Remember you can use Tab/click the Gamepad stick to use the authority visualization mode. Try requesting authority from another Client while in this mode.